人形机器人中的减速器怎么选?


摘要
机器人被誉为“制造业皇冠顶端的明珠”,而减速器则是这颗明珠中最核心的传动部件。它相当于机器人的肌肉与骨骼,负责将电机的高速旋转转化为精准的低速高扭矩输出,决定了机器人能否精确完成每一次抓取、搬运和装配。选择不对意味着整台机器人从源头上就失去了精准高效完成指令的能力。本文将深入解析主流减速器的技术特点与选型要领。
为什么减速器这么重要?
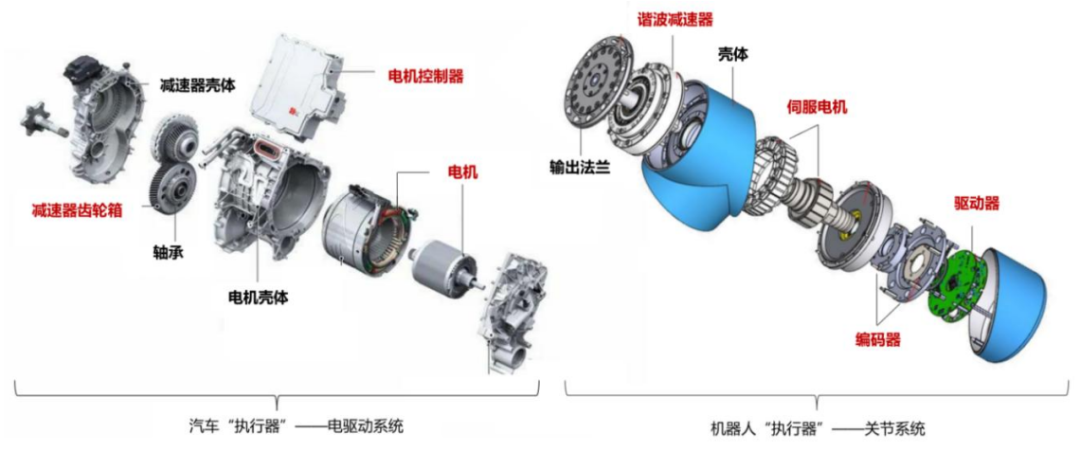
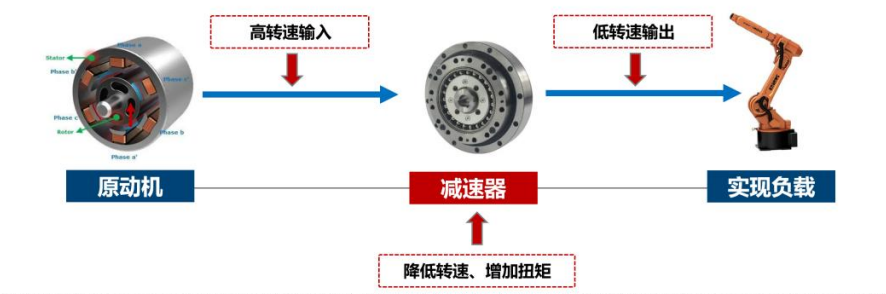
减速器是连接动力源(电机)和执行机构(关节、手臂等)的中间结构,其核心作用是 “降速增矩”—将电机的高转速降低,同时大幅提升输出扭矩,从而保证机器人运动控制的高精度与稳定性。
如果把伺服电机比作机器人的“肌肉”,那么减速器就是“肌腱”。没有它,电机即便转得再快,也无法让机器人的手臂稳定地举起重物或精确地停在某个位置。
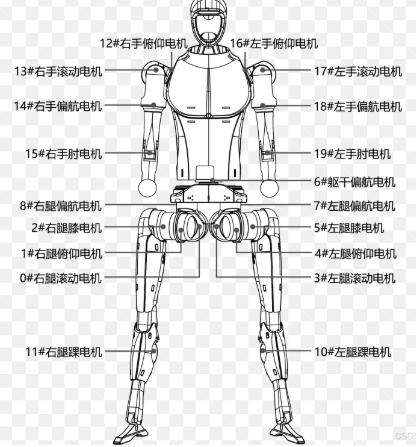
据统计,在工业机器人成本构成中,减速器占据了30% 左右,是成本占比最高的核心零部件之一。而在人形机器人中,减速器的用量将远高于传统工业机器人(单机用量仅为2~6台),几乎与伺服电机数量一致。更关键的是,减速器的技术壁垒极高,其设计、材料、设备、工艺、装配等环节都是一项 “系统工程” 。任何一个环节的疏忽,都会直接反映在整机性能上。
选型失误的直接后果包括:
- 精度崩塌:关节运动产生累积误差,导致产品合格率下降。
- 设备抖动与异响:二轴出现剧烈抖动、噪音异常增大。
- 轴承与齿轮损坏:长期过载导致齿轮齿面点蚀、轴承保持架断裂。
- 隐性成本飙升:能耗增加、频繁更换备件、停产损失远超减速机本身价值。
三大主流减速器深度对比
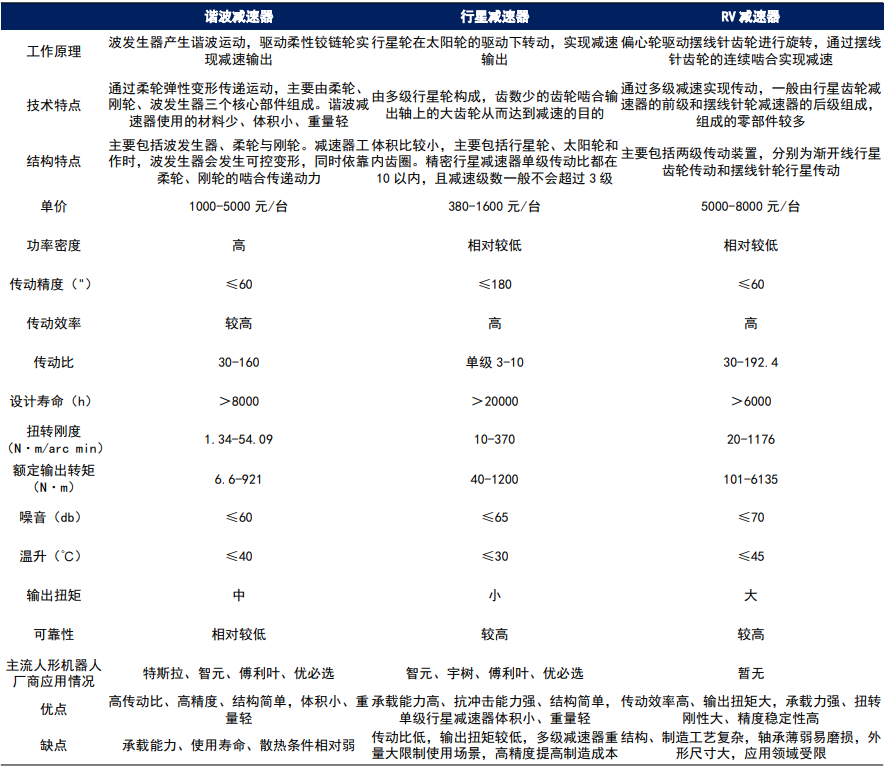
目前机器人领域应用最广的是三大主流减速器:谐波减速器、行星减速器和RV减速器。
1. 谐波减速器—精密轻载的“灵巧之手”
谐波减速器由波发生器、柔轮和刚轮三个核心部件组成,通过柔轮的弹性变形来传递运动。
- 核心参数:单级减速比50~320,传动效率80%~90%
- 核心优势:体积小、重量轻、传动精度极高(背隙可控制在10弧秒以内)
- 致命短板:柔轮在运动中不断发生弹性形变,易疲劳,长期重载或冲击工况下寿命会显著缩短;随着使用时间增长,运动精度会逐渐降低
- 最佳场景:机器人小臂、腕部、手部等对精度和灵活性要求高、负载较轻的关节

2. 行星减速器——中载动态的“实用之选”
行星减速器由中心轮、行星轮、内齿圈三部分构成,采用单级或多级传动结构。
- 核心参数:单级减速比3~10,传动效率高达95%以上
- 核心优势:结构紧凑、承载力强、传动效率极高、成本优势明显(一级减速的价格区间在小几百元)
- 主要局限:单级减速比偏小,精度相对不高,冲击工况下精度衰减严重
- 最佳场景:对成本敏感、精度要求适中的中载频繁摆动位置;人形机器人下肢驱动正大量采用行星减速器作为支撑方案
3. RV减速器——重载承重的“力量担当”
RV减速器由行星齿轮减速器(前级)和摆线针轮减速器(后级) 组成,结构相对复杂。
- 核心参数:传动效率85%~90%
- 核心优势:疲劳强度高、刚度和寿命极强,精度稳定性好,不会像谐波那样随时间显著衰减
- 明显短板:质量大、外形尺寸大,结构复杂
- 最佳场景:机器人机座、大臂、肩部等重负载部位;六轴工业机器人通常采用2个RV+4个谐波的组合方案
RV减速器在工业机器人重载部位(基座、大臂等)应用非常广泛,在人形机器人中目前应用相对较少,但行业正在研发轻量化微型RV方案,以适应人形机器人需求
选型口诀:精密轻载选谐波,中载动态抗摔选行星,重载承重选RV
选型避坑实战指南
第一坑:只看功率,忽略负载惯量和峰值扭矩
如果用户仅根据电机功率或转速选择减速机,忽略了实际负载惯量、加速度需求和峰值扭矩。在快速启停或频繁正反转的应用中,惯性扭矩可能远超额定输出扭矩,导致瞬时过载。避坑要点:必须进行精确的负载、惯量及工况分析,考虑冲击负载和瞬时峰值扭矩。
第二坑:忽视实际工况的复杂性
工作周期、冲击负载、温度、洁净度等因素都会影响减速器性能。选型时忽略实际工况的复杂性,可能导致设备在真实环境中“水土不服”。避坑要点:将需求工程化——“输出轴需要在3秒内加速到150RPM、持续扭矩0.8N·m、峰值2.4N·m、工作环境含泥沙与水”才是有效的工程输入。
第三坑:只选减速机,忽略整体机电集成
减速机与伺服电机的匹配性(接口尺寸、惯量比、带宽)至关重要。单独选择减速机而忽视整体集成,会导致系统性能无法充分发挥。避坑要点:关注减速机与电机的协同匹配,包括安装空间、润滑方式与维护便利性。
写在最后
减速器是机器人的“关节心脏”,选错将导致整机返工。三类主流减速器对比如下:谐波减速器:体积小、精度高,但柔轮易疲劳,适用于精密轻载的小臂、腕部。行星减速器:效率高、成本低,适用于中载动态、频繁摆动的场景(如人形机器人下肢)。RV减速器:刚性强、寿命长,但重量大,适用于重载承重的机座、大臂。选型口诀:精密轻载选谐波,中载动态选行星,重载承重选RV。选型前务必分析实际负载工况与机电匹配,避免后期高昂返工成本。
参考:https://pdf.dfcfw.com/pdf/H3_AP202409261640063356_1.pdf
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-06-01,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号