
numpy/枕中非线性函数的数值梯度
我试图在numpy中实现一个数值梯度计算,作为cyipopt中梯度的回调函数。我对numpy梯度函数的理解是,它应该返回在一个基于有限差分逼近的点上计算的梯度。
我不明白如何用这个模块实现非线性函数的梯度。给出的样本问题似乎是一个线性函数。
>>> f = np.array([1, 2, 4, 7, 11, 16], dtype=np.float)
>>> np.gradient(f)
array([ 1. , 1.5, 2.5, 3.5, 4.5, 5. ])
>>> np.gradient(f, 2)
array([ 0.5 , 0.75, 1.25, 1.75, 2.25, 2.5 ])我的代码片段如下:
import numpy as np
# Hock & Schittkowski test problem #40
x = np.mgrid[0.75:0.85:0.01, 0.75:0.8:0.01, 0.75:0.8:0.01, 0.75:0.8:0.01]
# target is evaluation at x = [0.8, 0.8, 0.8, 0.8]
f = -x[0] * x[1] * x[2] * x[3]
g = np.gradient(f)
print g它的另一个缺点是,我必须在几个点上计算x(并且在几个点返回梯度),在numpy/scipy中,是否有一个更好的选择,可以在单个点上对梯度进行数值计算,这样我就可以将其实现为回调函数了吗?
回答 2
Stack Overflow用户
发布于 2017-10-09 13:41:42
首先,有一些警告:
还有一些:
还有一些替代办法:
- 带解器的scipy.minimize或COBYLA,它可以为您做任何事情(SLSQP可以使用等式和不等式约束;COBYLA只使用不等式约束,其中模仿
x >= y+x <= y的等式约束是可行的)
用工具来完成你的任务
完整的示例问题在非线性规划码的测试实例中定义。
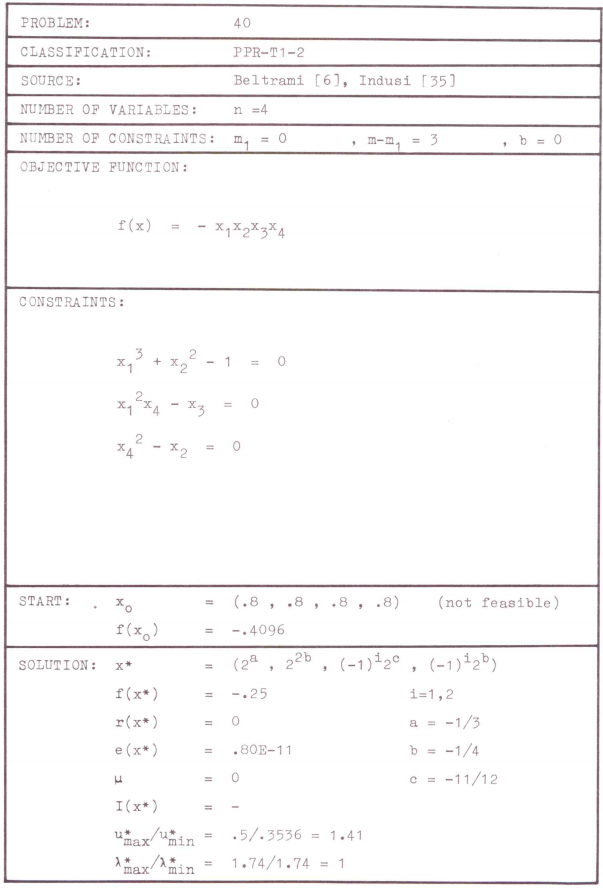
下面是一些基于数值微分的代码,用于解决您的测试问题,包括正式设置(函数、梯度、起点、边界、.)
import numpy as np
import scipy.sparse as sps
import ipopt
from scipy.optimize import approx_fprime
class Problem40(object):
""" # Hock & Schittkowski test problem #40
Basic structure follows:
- cyipopt example from https://pythonhosted.org/ipopt/tutorial.html#defining-the-problem
- which follows ipopt's docs from: https://www.coin-or.org/Ipopt/documentation/node22.html
Changes:
- numerical-diff using scipy for function & constraints
- removal of hessian-calculation
- we will use limited-memory approximation
- ipopt docs: https://www.coin-or.org/Ipopt/documentation/node31.html
- (because i'm too lazy to reason about the math; lagrange and co.)
"""
def __init__(self):
self.num_diff_eps = 1e-8 # maybe tuning needed!
def objective(self, x):
# callback for objective
return -np.prod(x) # -x1 x2 x3 x4
def constraint_0(self, x):
return np.array([x[0]**3 + x[1]**2 -1])
def constraint_1(self, x):
return np.array([x[0]**2 * x[3] - x[2]])
def constraint_2(self, x):
return np.array([x[3]**2 - x[1]])
def constraints(self, x):
# callback for constraints
return np.concatenate([self.constraint_0(x),
self.constraint_1(x),
self.constraint_2(x)])
def gradient(self, x):
# callback for gradient
return approx_fprime(x, self.objective, self.num_diff_eps)
def jacobian(self, x):
# callback for jacobian
return np.concatenate([
approx_fprime(x, self.constraint_0, self.num_diff_eps),
approx_fprime(x, self.constraint_1, self.num_diff_eps),
approx_fprime(x, self.constraint_2, self.num_diff_eps)])
def hessian(self, x, lagrange, obj_factor):
return False # we will use quasi-newton approaches to use hessian-info
# progress callback
def intermediate(
self,
alg_mod,
iter_count,
obj_value,
inf_pr,
inf_du,
mu,
d_norm,
regularization_size,
alpha_du,
alpha_pr,
ls_trials
):
print("Objective value at iteration #%d is - %g" % (iter_count, obj_value))
# Remaining problem definition; still following official source:
# http://www.ai7.uni-bayreuth.de/test_problem_coll.pdf
# start-point -> infeasible
x0 = [0.8, 0.8, 0.8, 0.8]
# variable-bounds -> empty => np.inf-approach deviates from cyipopt docs!
lb = [-np.inf, -np.inf, -np.inf, -np.inf]
ub = [np.inf, np.inf, np.inf, np.inf]
# constraint bounds -> c == 0 needed -> both bounds = 0
cl = [0, 0, 0]
cu = [0, 0, 0]
nlp = ipopt.problem(
n=len(x0),
m=len(cl),
problem_obj=Problem40(),
lb=lb,
ub=ub,
cl=cl,
cu=cu
)
# IMPORTANT: need to use limited-memory / lbfgs here as we didn't give a valid hessian-callback
nlp.addOption(b'hessian_approximation', b'limited-memory')
x, info = nlp.solve(x0)
print(x)
print(info)
# CORRECT RESULT & SUCCESSFUL STATE输出:
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit http://projects.coin-or.org/Ipopt
******************************************************************************
This is Ipopt version 3.12.8, running with linear solver mumps.
NOTE: Other linear solvers might be more efficient (see Ipopt documentation).
Number of nonzeros in equality constraint Jacobian...: 12
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 0
Total number of variables............................: 4
variables with only lower bounds: 0
variables with lower and upper bounds: 0
variables with only upper bounds: 0
Total number of equality constraints.................: 3
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
Objective value at iteration #0 is - -0.4096
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 -4.0960000e-01 2.88e-01 2.53e-02 0.0 0.00e+00 - 0.00e+00 0.00e+00 0
Objective value at iteration #1 is - -0.255391
1 -2.5539060e-01 1.28e-02 2.98e-01 -11.0 2.51e-01 - 1.00e+00 1.00e+00h 1
Objective value at iteration #2 is - -0.249299
2 -2.4929898e-01 8.29e-05 3.73e-01 -11.0 7.77e-03 - 1.00e+00 1.00e+00h 1
Objective value at iteration #3 is - -0.25077
3 -2.5076955e-01 1.32e-03 3.28e-01 -11.0 2.46e-02 - 1.00e+00 1.00e+00h 1
Objective value at iteration #4 is - -0.250025
4 -2.5002535e-01 4.06e-05 1.93e-02 -11.0 4.65e-03 - 1.00e+00 1.00e+00h 1
Objective value at iteration #5 is - -0.25
5 -2.5000038e-01 6.57e-07 1.70e-04 -11.0 5.46e-04 - 1.00e+00 1.00e+00h 1
Objective value at iteration #6 is - -0.25
6 -2.5000001e-01 2.18e-08 2.20e-06 -11.0 9.69e-05 - 1.00e+00 1.00e+00h 1
Objective value at iteration #7 is - -0.25
7 -2.5000000e-01 3.73e-12 4.42e-10 -11.0 1.27e-06 - 1.00e+00 1.00e+00h 1
Number of Iterations....: 7
(scaled) (unscaled)
Objective...............: -2.5000000000225586e-01 -2.5000000000225586e-01
Dual infeasibility......: 4.4218750883118219e-10 4.4218750883118219e-10
Constraint violation....: 3.7250202922223252e-12 3.7250202922223252e-12
Complementarity.........: 0.0000000000000000e+00 0.0000000000000000e+00
Overall NLP error.......: 4.4218750883118219e-10 4.4218750883118219e-10
Number of objective function evaluations = 8
Number of objective gradient evaluations = 8
Number of equality constraint evaluations = 8
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 8
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 0
Total CPU secs in IPOPT (w/o function evaluations) = 0.016
Total CPU secs in NLP function evaluations = 0.000
EXIT: Optimal Solution Found.
[ 0.79370053 0.70710678 0.52973155 0.84089641]
{'x': array([ 0.79370053, 0.70710678, 0.52973155, 0.84089641]), 'g': array([ 3.72502029e-12, -3.93685085e-13, 5.86974913e-13]), 'obj_val': -0.25000000000225586, 'mult_g': array([ 0.49999999, -0.47193715, 0.35355339]), 'mult_x_L': array([ 0., 0., 0., 0.]), 'mult_x_U': array([ 0., 0., 0., 0.]), 'status': 0, 'status_msg': b'Algorithm terminated successfully at a locally optimal point, satisfying the convergence tolerances (can be specified by options).'}关于代码的备注
- 我们使用fprime,它基本上是为scipy.optimize中所有基于梯度的优化器添加的。
- 如消息来源所述,我不关心伊波普对麻雀的需求,我们使用了ipopts 哈森近似
- 基本思想在wiki: LBFGS上进行了描述
- 我确实忽略了ipopts对约束的Jacobian稀疏结构的需要。
- 默认假设:默认的恒心结构是一个较低的三角矩阵,我不会保证这里会发生什么(糟糕的性能与破坏一切)
Stack Overflow用户
发布于 2017-10-09 13:28:55
我认为你对什么是数学函数以及它的数值实现有某种误解。
您应该将您的功能定义为:
def func(x1, x2, x3, x4):
return -x1*x2*x3*x4现在,您希望在特定的点评估您的函数,可以使用您提供的np.mgrid进行评估。
如果要计算梯度,请使用copy.misc.derivative(https://docs.scipy.org/doc/scipy/reference/generated/scipy.misc.derivative.html) (注意dx通常不好的默认参数,将其更改为1e-5 )。数值计算中,线性梯度与非线性梯度没有差别,只是对于非线性函数,梯度在任何情况下都不一样。
您使用np.gradient实际上是从数组中的点计算梯度,函数的定义被f的定义所隐藏,因此不允许在不同的点上进行多个梯度计算。此外,使用您的方法使您依赖您的谨慎步骤。
https://stackoverflow.com/questions/46641453
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号