
计算梯度方向(HOG样)精度不高
计算梯度方向(HOG样)精度不高
提问于 2016-01-18 10:44:32
本文尝试实现一种基于梯度方向匹配的图像匹配算法。主要的algo包括以下步骤:

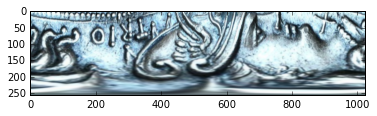
- 将图像转换为极坐标:
- 使用sobel算子计算梯度: Xgrad = cv2.Sobel(gr,cv2.CV_64F,1,0,ksize=5)
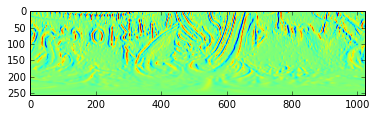
Ygrad = cv2.Sobel(gr,cv2.CV_64F,0,1,ksize=3)
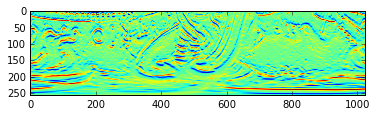
3)计算梯度的方向,并进行二值化。:
现在,我可以比较图像使用最后的功能,地图与无知旋转和轻微的变化。
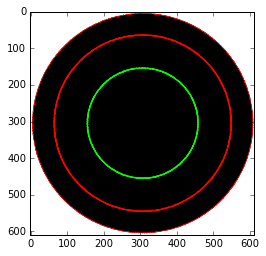
但是我所发现的是,这个algo检测的是同一图像的旋转,而不是纯粹的旋转。我已经用圆圈构建了一个测试映像来测试这个algo:
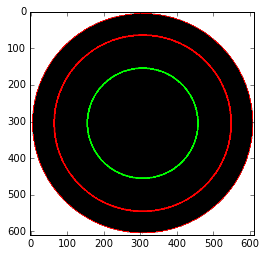
把它旋转到10年级
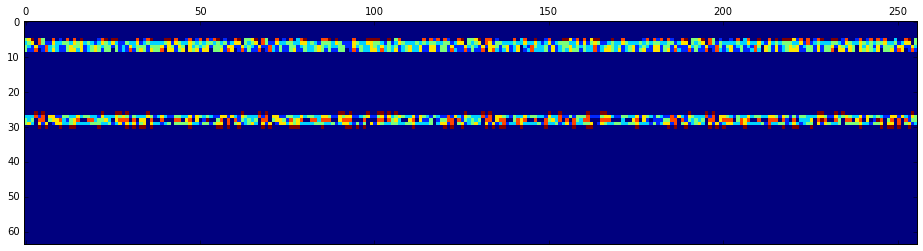
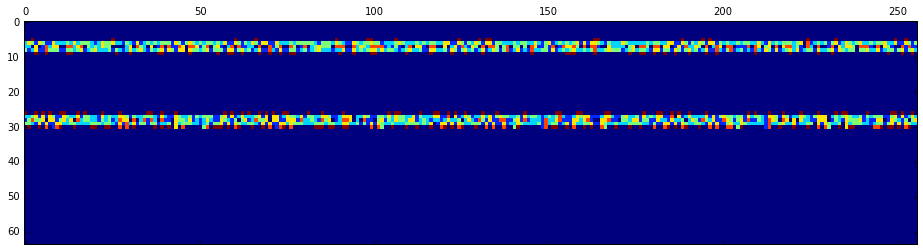
以下是极地转换:
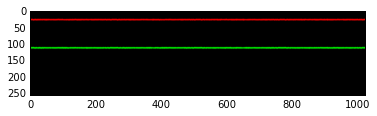
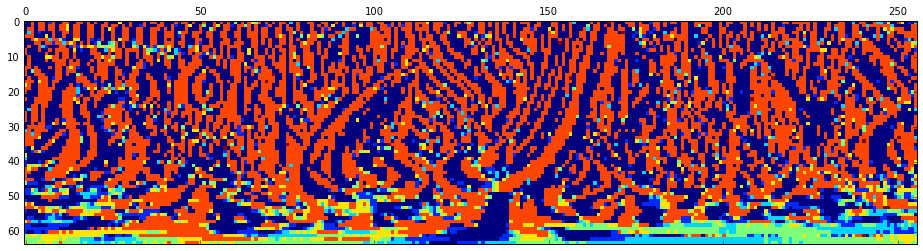
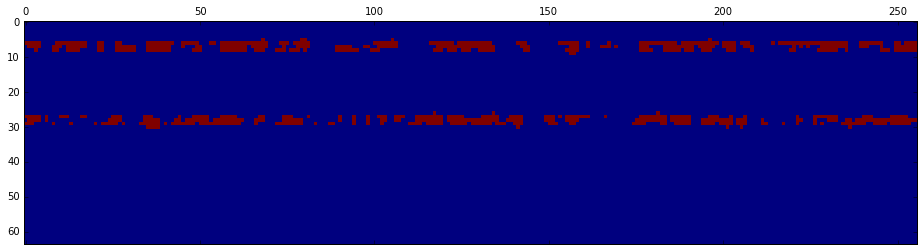
梯度方向掩模:正如你所看到的,梯度矩阵上已经有很多噪声。它和阿尔戈相配。
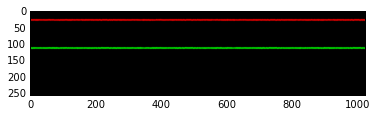
这是最好的传递差分掩码:整个线区域被标记为不匹配。小高斯模糊在不同的步骤是没有帮助的。我不知道为什么。
更新:
梯度计算:
gx = cv2.Sobel(gr,cv2.CV_64F,1,0,ksize=1)
gy = cv2.Sobel(gr,cv2.CV_64F,0,1,ksize=1)
blurredgx = cv2.GaussianBlur(gx,(11,3),1)
blurredgy = cv2.GaussianBlur(gy,(11,3),1)
magnitude, angle = cv2.cartToPolar(blurredgx, blurredgy)回答 1
Stack Overflow用户
发布于 2016-01-18 19:15:47
你能解释一下你是如何计算渐变方向的吗?我相信您已经将每个4x4窗口分组,并计算了每个这样的窗口内渐变的方向。但所使用的sobel操作符的大小为5x5。这显然会导致一些重叠。你能解释一下吗?
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/34852761
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号